안녕하세요. 수수입니다.
2026년 1월, 테슬라의 새로운 특허가 공개되면서 AI 업계가 술렁이고 있습니다. US20260017019A1 특허로 공개된 “Mixed-Precision Bridge” 기술은, 저렴한 8비트 칩으로 고급 32비트 AI 모델을 구동할 수 있게 해주는 혁신적인 기술입니다.
일론 머스크는 이 소식에 대해 이렇게 트윗했습니다:
Necessity is the mother of invention.
— Elon Musk (@elonmusk) January 19, 2026
The @Tesla_AI team is epicly hardcore. No one can match Tesla's real-world AI. https://t.co/example
번역: “필요는 발명의 어머니다. 테슬라 AI 팀은 극한의 하드코어다. 누구도 테슬라의 실전 AI를 따라올 수 없다.”
오늘은 이 특허가 왜 중요한지, 그리고 테슬라의 FSD와 Optimus에 어떤 영향을 미치는지 자세히 살펴보겠습니다.
목차
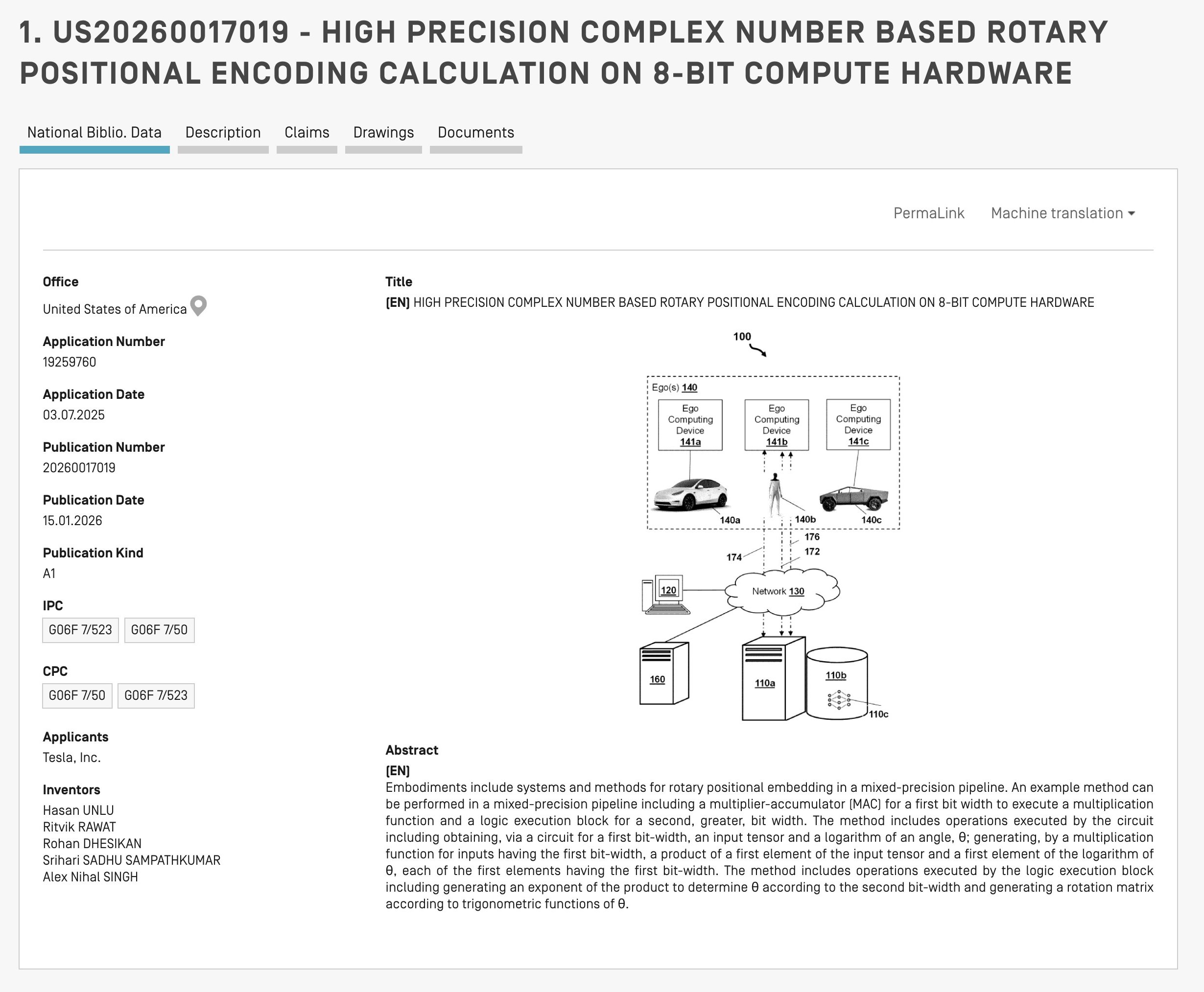 테슬라 특허 US20260017019 - 8비트 하드웨어에서 고정밀 회전 위치 인코딩 계산
테슬라 특허 US20260017019 - 8비트 하드웨어에서 고정밀 회전 위치 인코딩 계산
1. 핵심 요약: 실리콘의 법칙을 다시 쓰다
| 항목 | 기존 방식 | 테슬라 Mixed-Precision Bridge |
|---|---|---|
| 연산 정밀도 | 32비트 필수 | 8비트로 32비트 정밀도 달성 |
| 전력 소모 | 500W+ | 100W 이하 |
| 메모리 사용량 | 100% | 50% 절감 |
| 컨텍스트 길이 | 제한적 | 128k 토큰까지 확장 |
| 발열 | 높음 | 대폭 감소 |
이 기술의 핵심은 “로그(log) 압축”입니다. 복잡한 32비트 연산을 로그 형태로 압축해서 8비트 하드웨어로 전송한 뒤, 다시 원래 정밀도로 복원하는 방식입니다.
2. 문제 정의: 정밀도 vs 전력의 전쟁
RoPE(Rotary Positional Encoding)란?
자율주행차와 휴머노이드 로봇에서 AI가 공간과 시간에서 자신의 위치를 이해하려면 RoPE(회전 위치 인코딩)가 필요합니다. 이것은 AI의 “마음의 GPS”라고 할 수 있습니다.
문제점:
- RoPE의 삼각함수(사인, 코사인) 계산에는 32비트 부동소수점 연산이 필요
- 8비트 정수 연산기(INT8)로 처리하면 오차가 누적되어 AI가 제대로 인식하지 못함
- Optimus 로봇의 경우 작은 수학적 오차가 균형 상실이나 거리 오판으로 이어짐
| 비유 | 설명 |
|---|---|
| 32비트 연산 | 소수점 10자리까지 정확한 항공 경로 계산 |
| 8비트 연산 | 모든 숫자를 가장 가까운 정수로 반올림 |
3. 테슬라의 해결책: 로그 변환과 사전 계산
3.1 로그(log) 압축 - “농축 주스” 전략
테슬라 엔지니어들은 전체 파이프라인을 고정밀도로 유지할 필요가 없다는 것을 깨달았습니다.
핵심 아이디어:
- 위치 지정에 사용되는 중요한 각도를 로그로 변환
- 로그의 동적 범위가 원래 숫자보다 훨씬 작아 8비트 하드웨어로 전송 가능
- 목적지에서 다시 원래 값으로 복원
🍹 비유: 오렌지 주스를 농축액으로 만들어 운송하는 것과 같습니다. 부피가 줄어들어 운반이 쉽고, 나중에 물만 타면 원래 주스로 완벽하게 복원됩니다.
3.2 사전 계산 룩업 테이블
특허에 따르면, 시스템은 매번 로그를 실시간으로 계산하지 않습니다:
- 미리 계산해둔 로그 값을 저장소에서 바로 가져옴
- 연산 시간을 절약하면서 정밀도 유지
4. 복원 아키텍처: 테일러 급수와 호너 방법
4.1 32비트 정밀도로 복원하기
8비트 곱셈기(MAC)가 작업을 마치면 데이터는 여전히 “농축된” 로그 상태입니다. 이를 실제 각도 θ로 복원하기 위해 테슬라의 고정밀 ALU는 호너 방법(Horner’s Method)으로 최적화된 테일러 급수 전개를 사용합니다.
| 단계 | 연산 |
|---|---|
| 1단계 | 상수 1/3 곱셈 |
| 2단계 | 상수 1/2 곱셈 |
| 3단계 | 최종 근사값 계산 |
결과: 32비트 정확도를 유지하면서 연산 시간은 크게 단축
4.2 회전 행렬(Rotation Matrix) 생성
각도가 복원되면 고정밀 로직이 회전 행렬(사인과 코사인 값의 그리드)을 생성하여 데이터 포인트를 정확한 3D 좌표에 고정합니다.
5. 데이터 연결: 8비트 입력을 16비트 출력으로
이 특허에서 가장 기발한 아이디어 중 하나입니다. 기존 하드웨어를 바꾸지 않고도 데이터 전송 속도를 2배로 늘리는 방법을 찾아냈습니다.
작동 방식:
- 연산 장치(MAC)를 데이터 병합기로 활용
- 두 개의 8비트 값을 가져옴 (예: X좌표와 로그값의 앞부분)
- 하나를 비트 이동시켜 자릿수를 올림
- 두 값을 합쳐서 16비트 데이터로 만듦
✨ 효과: 물리적 하드웨어 재설계 없이 기존 배선의 대역폭을 2배로 늘림
6. 장기 컨텍스트 메모리: 30초 전 정지 신호 기억하기
6.1 “잊어버림” 문제 해결
이전 FSD 버전에서는:
- 차량이 정지 신호를 봄
- 트럭이 5초간 시야를 가림
- AI가 정지 신호가 존재했다는 것을 “잊어버림”
테슬라의 해결책:
- 30초 이상의 데이터를 되돌아볼 수 있는 “장기 컨텍스트” 창
- Mixed-Precision 파이프라인으로 높은 위치 해상도 유지
- RoPE 연산이 매우 정밀하여 정지 신호가 AI의 내부 지도에서 정확한 3D 좌표에 고정 유지
6.2 KV-캐시 최적화
| 기존 방식 | 테슬라 방식 |
|---|---|
| 전체 위치 데이터 저장 | 로그 형태로 저장 |
| 메모리 100% 사용 | 50% 이상 절감 |
| 제한된 히스토리 | 128k 토큰까지 확장 |
6.3 페이지드 어텐션(Paged Attention)
운영체제에서 차용한 기법:
- 하나의 거대한 연속 메모리 블록 대신 작은 “페이지”로 분할
- 필요한 곳에만 동적으로 공간 할당
- 동시에 추적할 수 있는 객체(보행자, 차량, 표지판) 수 대폭 증가
7. 파이프라인 무결성: “읽기 전용” 안전 잠금
특허의 미묘하지만 중요한 세부사항:
| 보안 메커니즘 | 설명 |
|---|---|
| 단방향 데이터 흐름 | 변환된 좌표는 다음 단계에서 읽기만 가능, 수정 불가 |
| 피드백 루프 방지 | 시스템이 과거 데이터를 실수로 덮어쓰는 것 방지 |
| 오인식 방지 | AI가 잘못된 데이터로 헛것을 보는 현상 차단 |
🔒 핵심: “진실”은 오직 한 방향으로만 흐름 - 의사결정 엔진을 향해
8. 어텐션 싱크: 메모리 오버플로 방지
로봇이 몇 시간 동안 작동하면 모든 것을 영원히 기억할 수 없습니다.
문제:
- AI 모델은 연산 부담을 첫 번째 데이터에 집중시키는 경향이 있음
- 단순히 오래된 메모리를 삭제하면 이 핵심 데이터도 함께 사라짐
- 결과적으로 AI가 오작동
테슬라의 해결책:
- 핵심 기준 데이터를 메모리에 영구 보존
- 나머지 메모리는 계속 갱신되더라도 기준점은 안정적으로 유지
- 장시간 연속 작업에서도 신경망 안정화
9. 희소 텐서: 계산 낭비 제거
9.1 “빈 공간” 문제
현실 세계에서 차량이나 로봇이 보는 것의 대부분은 “빈” 공간(맑은 하늘 등)입니다.
| 기존 방식 | 테슬라 방식 |
|---|---|
| 모든 0을 곱하며 전력 낭비 | 0을 완전히 건너뜀 |
| 전체 데이터 처리 | 비제로 값과 위치만 저장 |
9.2 하드웨어 기반 희소 연산 가속
테슬라의 최신 아키텍처는 좌표 기반 시스템을 사용:
- 실제 값이 있는 데이터와 그 위치만 저장
- 빈 공간은 완전히 건너뛰고 실제 데이터에만 집중
- AI5 칩의 처리량 2배 증가 + 에너지 소비 대폭 감소
10. 오디오 엣지: 사이렌 감지를 위한 Log-Sum-Exp
테슬라의 “실리콘 브릿지”는 비전만을 위한 것이 아닙니다.
응용 분야:
- 응급 사이렌 식별
- 충돌 소리 감지
- Log-Mel 스펙트로그램 접근법 사용
| 소리 유형 | 기존 문제 | 테슬라 해결책 |
|---|---|---|
| 작은 소리 | 무시될 위험 | Log-Sum-Exp로 정확히 감지 |
| 큰 사이렌 | 소리가 찌그러질 위험 | 8비트로도 32비트급 선명도 달성 |
11. 양자화 인식 훈련(QAT)
기존 방식의 문제:
- 완벽한 32비트 환경에서 AI 훈련
- 나중에 8비트로 압축
- AI 정확도가 크게 떨어짐
테슬라의 접근법:
- 처음부터 8비트 환경을 고려해서 모델 훈련
- 훈련 단계에서 반올림 오류와 노이즈를 미리 경험시킴
- 실전에 강한 신경망 생성
✈️ 비유: 폭풍 상황을 그대로 재현한 비행 시뮬레이터에서 훈련한 조종사처럼, 실제 환경에서도 AI가 흔들리지 않고 정확하게 작동
12. 전략적 로드맵: AI5부터 유비쿼터스 엣지 AI까지
이 특허는 단순한 부가 기능이 아닙니다. 테슬라의 미래 하드웨어를 위한 핵심 기반 기술입니다.
12.1 AI5 칩 활성화
| 항목 | 내용 |
|---|---|
| 성능 | 현재 하드웨어 대비 40배 |
| 대역폭 | 로그 공간 압축으로 4배 효과적 증가 |
| 설계 | “하프 레티클” 설계로 실리콘 크기 축소, 제조 수율 극대화 |
12.2 Optimus 로봇의 운영 생존
| 항목 | 기존 | Mixed-Precision |
|---|---|---|
| 배터리 | 2.3kWh (모델3의 1/30) | 동일 |
| 컴퓨트 전력 | 500W+ | 100W 이하 |
| 작동 시간 | 4시간 미만 | 8시간 풀타임 교대 |
| 발열 | 과열 위험 | 열 장벽 해결 |
12.3 완전 신경망 기반 자율주행 전환
- 정밀한 위치 보정으로 시간이 지나도 오차 누적 방지
- 30초 전에 본 정지 신호도 AI 내부 지도에서 정확한 3D 좌표에 고정 유지
12.4 전략적 독립성 확보
| 전략 | 효과 |
|---|---|
| NVIDIA CUDA 생태계 탈피 | 자체 칩에 연산 로직 내장 |
| 삼성 + TSMC 이중 파운드리 | 공급망 리스크 완화 |
| 의도적 여유 생산 | 대기 중인 차량과 여분의 칩을 분산 AI 클라우드로 활용 |
12.5 “모든 것에 Tesla AI” 청사진
전력 소비를 획기적으로 줄임으로써:
- 스마트 홈 기기나 스마트폰에도 최고 수준의 AI 비전 모델 탑재 가능
- 작고 발열이 적은 칩으로 즉각적인 3D 공간 인식
- 개인 데이터를 클라우드로 보내지 않고 기기 자체에서 슈퍼컴퓨터급 AI 구현
13. 결론: 실리콘 혁명의 시작
테슬라의 Mixed-Precision Bridge 특허는 단순한 기술적 개선이 아닙니다. 이것은 AI 하드웨어의 패러다임을 바꾸는 혁신입니다.
핵심 포인트
| 분야 | 의미 |
|---|---|
| FSD | 30초 이상의 장기 메모리로 더 안전한 자율주행 |
| Optimus | 8시간 풀타임 작업이 가능한 효율적 로봇 |
| AI5 칩 | 40배 성능 향상을 실제로 활용 가능 |
| 엣지 AI | 스마트폰 수준에서 슈퍼컴퓨터급 AI 구동 |
일론 머스크의 말처럼, “필요는 발명의 어머니”입니다. 테슬라는 더 저렴한 하드웨어로 더 강력한 AI를 구동해야 하는 필요에 직면했고, 그 해결책으로 실리콘의 법칙 자체를 다시 썼습니다.
이 특허가 실제 제품에 적용되면, 테슬라는 경쟁사들이 따라오기 어려운 비용-성능 격차를 만들어낼 것입니다. FSD와 Optimus의 미래가 더욱 밝아 보이는 이유입니다.
참고 자료
- Tesla Patent US20260017019A1 - Mixed-Precision Bridge
- Elon Musk Twitter/X
- @tslaming 원본 분석 트윗
- 테슬라 AI 팀 공식
여러분의 생각은? 이 기술이 자율주행과 로봇 산업에 어떤 변화를 가져올까요? 댓글로 의견을 나눠주세요!